

 联系我们
联系我们

数字输入 / 输出端
机器人控制系统***多可以管理 8192 个数字输入端和 8192 个数字输出端。在 默认配置中,有 4096 个输入和输出端可供使用。
模拟输入 / 输出端
机器人控制系统可以管理 32 个模拟信号输入端和 32 个模拟信号输出端。 输入 / 输出端可通过以下系统变量管理:

$ANIN[…] 显示输入端电压,在 -1.0 和 +1.0 范围内调整。实际电压取决于模拟模块的设置。通过 $ANOUT[…] 可设置模拟电压。$ANOUT[…] 可通过 -1.0 至 +1.0 之间的值加以说明。实际产生的电压取决于模拟模块的设置。如尝试将电压值设置成超出值域范围,则机器人控制系统显示以下信息: 限制 { 信号名称 }
设置数字输出端 - OUT
前提条件
程序已选定。
运行方式 T1
操作步骤 1. 将光标放到其后应插入逻辑指令的一行上。
2. 选择菜单序列指令 > 逻辑 > OUT > OUT。
3. 在联机表格中设置参数。
(>>> 10.7.3 " 行指令 OUT" 页面 310)
4. 用指令 OK 存储指令。
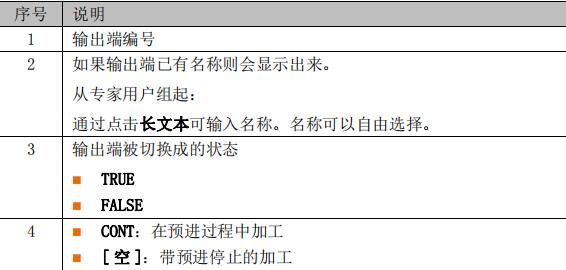
10.7.3 行指令 OUT
指令设定了一个数字输出端。
设置脉冲输出端 - PULSE
前提条件
程序已选定。
运行方式 T1
操作步骤 1. 将光标放到其后应插入逻辑指令的一行上。
2. 选择菜单序列指令 > 逻辑 > OUT > PULSE。
3. 在联机表格中设置参数。
(>>> 10.7.5 "PULSE 的联机表格 " 页面 311)
